





brain of mat kelcey...
out of distribution detection using focal loss
December 02, 2020 at 01:00 PM | categories: objax, jax, projectsout of distribution (OOD) detection
OOD detection is an often overlooked part of many projects. it's super important to understand when your model is operating on data it's not familiar with!
though this can be framed as the problem of detecting that an input differs from training data, discussed more in this 'data engineering concerns for machine learning products' talk, for this post we're going to look at the problem more from the angle of the model needing to be able to express it's own lack of confidence.
a core theme of this post is treating OOD as a function of the output of the model. when i've played with this idea before the best result i've had is from using entropy as a proxy of confidence. in the past it's not be in the context of OOD directly but instead as a way of prioritising data annotation (i.e. uncertainty sampling for active learning)
using entropy as a stable measure of confidence though requires a model be well calibrated.
neural net calibration
neural nets are sadly notorious for not being well calibrated under the default ways we train these days.
the first approach i was shown to calibrate a neural net is to train your model as normal, then finetune just the final classifier layer using a held out set; the general idea being that this is effectively just a logistic regression on features learnt by the rest of the network and so should come with the better guarantees that logistic regression provides us regarding calibration (see this great overview from sklearn) whereas this has always worked well for me it does require two steps to training, as well as the need for a seperate held out set to be managed.
another apporach to calibration i revisited this week comes from this great overview paper from 2017 on calibration of modern neural networks. it touches on platt scaling, which i've also used in the past successfully, but includes something even simpler i didn't really notice until it was pointed out to me by a colleague; don't bother tuning the entire last layer, just fit a single temperature rescaling of the output logits i.e. what can be thought of as a single parameter version of platt scaling. what a great simple idea!
the main purpose of this post though is to reproduce some ideas around out of distribution and calibration when you use focal loss. this was described in this great piece of work calibrating deep neural networks using focal loss. we'll implement that, but the other two as well for comparison.
( as an aside, another great simple way of determining confidence is using an ensemble! i explore this idea a bit in my post on ensemble nets where i train ensembles as a single model using jax vmap )
experiments
dataset
let's start with cifar10 and split the data up a bit differently than the standard splits...
- we'll union the standard cifar10
trainandtestsplits. - hold out instances labelled
automobile&catas a "hard"oodset ( i've intentionally chosen these two since i know they cause model confusion as observed in this keras.io tute on metric learning ). - split the remaining 8 classes into 0.7
trainand 0.1 for each ofvalidation,calibrationandtest.
we'll additionally generate an "easy" ood set which will just be random images.
in terms of how we'll use these splits...
trainwill be the main dataset to train against.validationwill be used during training for learning rate stepping, early stopping, etc.calibrationwill be used when we want to tune a model in some way for calibration.testwill be used for final held out analysis.ood_hardandood_easywill be used as the representative out of distribution sets.
| examples images | |
| in distribution |  |
| out of distribution (hard) |  |
| out of distribution (easy) |  |
method overview
- train a base model,
model_1, ontrain, tuning againstvalidate. - create
model_2by finetuning the last layer ofmodel_1againstcalibrate; i.e. the logisitic regression approach to calibration. - create
model_3by just fitting a scalar temperture of last layer ofmodel_1; i.e. the temperture scaling approach. - train some focal loss models from scratch against
trainusingvalidatefor tuning.
at each step we'll check the entropy distributions across the various splits, including the easy and hard ood sets
model_1: baseline
for a baseline we'll use a
resnet18 objax model
trained against train using validate for simple early stopping.
# define model model = objax.zoo.resnet_v2.ResNet18(in_channels=3, num_classes=10) # train against all model vars trainable_vars = model.vars()
$ python3 train_basic_model.py --loss-fn cross_entropy --model-dir m1 learning_rate 0.001 validation accuracy 0.372 entropy min/mean/max 0.0005 0.8479 1.9910 learning_rate 0.001 validation accuracy 0.449 entropy min/mean/max 0.0000 0.4402 1.9456 learning_rate 0.001 validation accuracy 0.517 entropy min/mean/max 0.0000 0.3566 1.8013 learning_rate 0.001 validation accuracy 0.578 entropy min/mean/max 0.0000 0.3070 1.7604 learning_rate 0.001 validation accuracy 0.680 entropy min/mean/max 0.0000 0.3666 1.7490 learning_rate 0.001 validation accuracy 0.705 entropy min/mean/max 0.0000 0.3487 1.6987 learning_rate 0.001 validation accuracy 0.671 entropy min/mean/max 0.0000 0.3784 1.8276 learning_rate 0.0001 validation accuracy 0.805 entropy min/mean/max 0.0000 0.3252 1.8990 learning_rate 0.0001 validation accuracy 0.818 entropy min/mean/max 0.0000 0.3224 1.7743 learning_rate 0.0001 validation accuracy 0.807 entropy min/mean/max 0.0000 0.3037 1.8580
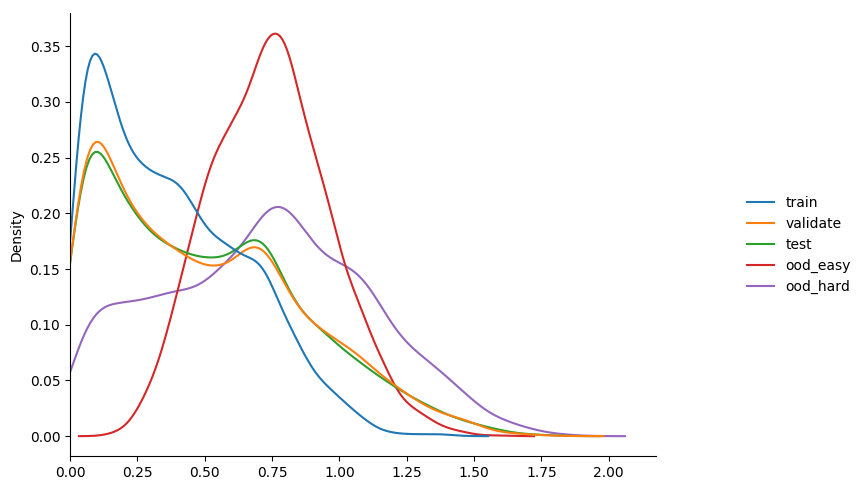
we can check the distribution of entropy values of this trained model against our various splits
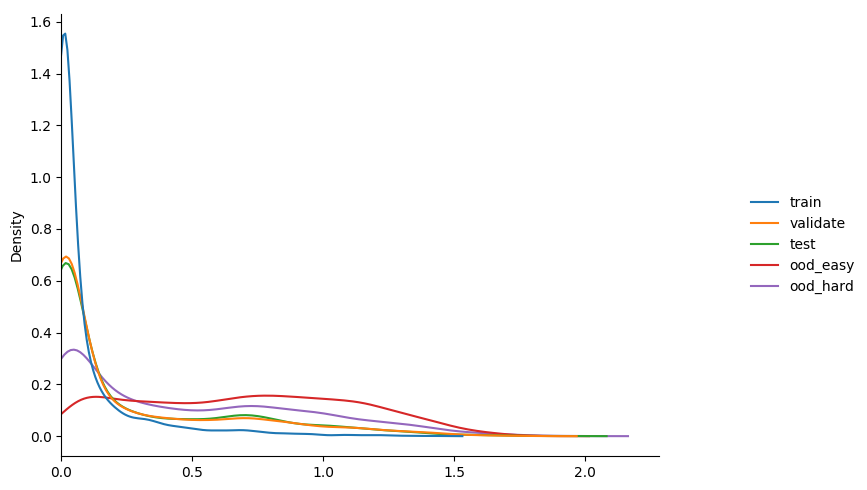
some observations...
- highest confidence, i.e. lowest entropy, on training set.
- equiv values on validation and test; both < training.
- ood lowest of all; this is a good thing!
- mean value of entropy on the validation set slowly drops over training.
recall that a higher entropy => a more uniform distribution => less prediction confidence.
as such our goal is to have the entropy of the ood set as high as possible without
dropping the test set too much.
model_2: fine tuning entire classifier layer
as mentioned before the main approach i'm familiar with is retraining the classifier
layer. we'll start with model_1 and use the so-far-unseen calibration set for fine tuning it.
# define model
model = objax.zoo.resnet_v2.ResNet18(in_channels=3, num_classes=10)
# restore from model_1
objax.io.load_var_collection('m1/weights.npz', model.vars())
# train against last layer only
classifier_layer = model[-1]
trainable_vars = classifier_layer.vars()
$ python3 train_model_2.py --input-model-dir m1 --output-model-dir m2 learning_rate 0.001 calibration accuracy 0.808 entropy min/mean/max 0.0000 0.4449 1.8722 learning_rate 0.001 calibration accuracy 0.809 entropy min/mean/max 0.0002 0.5236 1.9026 learning_rate 0.001 calibration accuracy 0.808 entropy min/mean/max 0.0004 0.5468 1.9079 learning_rate 0.001 calibration accuracy 0.811 entropy min/mean/max 0.0005 0.5496 1.9214 learning_rate 0.001 calibration accuracy 0.812 entropy min/mean/max 0.0001 0.5416 1.9020 learning_rate 0.001 calibration accuracy 0.812 entropy min/mean/max 0.0002 0.5413 1.9044 learning_rate 0.001 calibration accuracy 0.811 entropy min/mean/max 0.0003 0.5458 1.8990 learning_rate 0.001 calibration accuracy 0.814 entropy min/mean/max 0.0001 0.5472 1.9002 learning_rate 0.001 calibration accuracy 0.812 entropy min/mean/max 0.0001 0.5455 1.9124 learning_rate 0.001 calibration accuracy 0.813 entropy min/mean/max 0.0001 0.5503 1.9092 learning_rate 0.0001 calibration accuracy 0.813 entropy min/mean/max 0.0001 0.5485 1.9011 learning_rate 0.0001 calibration accuracy 0.814 entropy min/mean/max 0.0001 0.5476 1.9036 learning_rate 0.0001 calibration accuracy 0.813 entropy min/mean/max 0.0001 0.5483 1.9051 learning_rate 0.0001 calibration accuracy 0.813 entropy min/mean/max 0.0000 0.5479 1.9038 learning_rate 0.0001 calibration accuracy 0.813 entropy min/mean/max 0.0000 0.5482 1.9043 learning_rate 0.0001 calibration accuracy 0.813 entropy min/mean/max 0.0000 0.5482 1.9059 learning_rate 0.0001 calibration accuracy 0.813 entropy min/mean/max 0.0000 0.5479 1.9068 learning_rate 0.0001 calibration accuracy 0.813 entropy min/mean/max 0.0000 0.5480 1.9058 learning_rate 0.0001 calibration accuracy 0.812 entropy min/mean/max 0.0000 0.5488 1.9040 learning_rate 0.0001 calibration accuracy 0.814 entropy min/mean/max 0.0000 0.5477 1.9051
if we compare (top1) accuracy of model_1 vs model_2 we see a slight improvement
in model_2, attributable to the slight extra training i suppose (?)
$ python3 calculate_metrics.py --model m1/weights.npz train accuracy 0.970 validate accuracy 0.807 calibrate accuracy 0.799 test accuracy 0.803 $ python3 calculate_metrics.py --model m2/weights.npz train accuracy 0.980 validate accuracy 0.816 calibrate accuracy 0.814 test accuracy 0.810
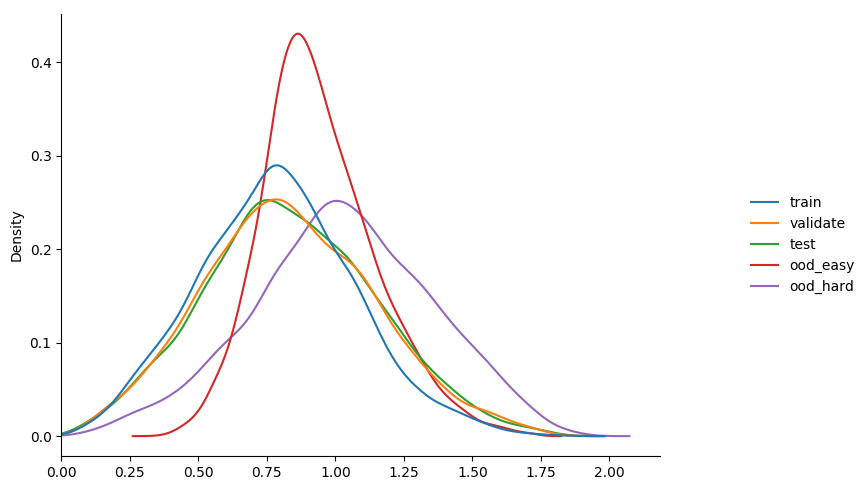
more importantly though; how do the entropy distributions looks?
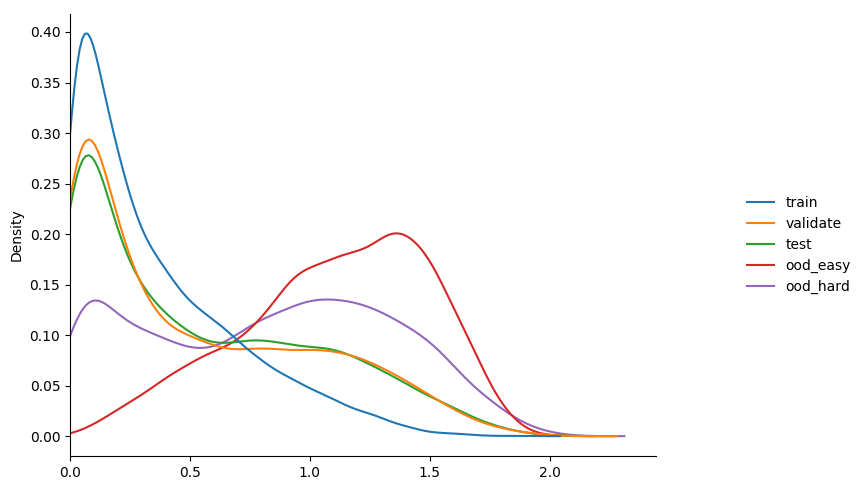
some observations...
- calibration accuracy and entropy during training shifted a bit, but not a lot.
- again highest confidence on training.
- again equiv values on validation and test; both < training.
- ood difference a bit more distinct now.
model_3: fit a scalar temperature value to logits
in model_3 we create a simple single parameter layer that represents rescaling,
append it to the pretrained resnet and train just that layer.
class Temperature(objax.module.Module):
def __init__(self):
super().__init__()
self.temperature = objax.variable.TrainVar(jnp.array([1.0]))
def __call__(self, x):
return x / self.temperature.value
# define model
model = objax.zoo.resnet_v2.ResNet18(in_channels=3, num_classes=10)
# restore from model_1
objax.io.load_var_collection('m1/weights.npz', model.vars())
# add a temp rescaling layer
temperature_layer = layers.Temperature()
model.append(temperature_layer)
# train against just this layer
trainable_vars = temperature_layer.vars()
$ python3 train_model_3.py --input-model-dir m1 --output-model-dir m3 learning_rate 0.01 temp 1.4730 calibration accuracy 0.799 entropy min/mean/max 0.0006 0.5215 1.9348 learning_rate 0.01 temp 1.5955 calibration accuracy 0.799 entropy min/mean/max 0.0013 0.5828 1.9611 learning_rate 0.01 temp 1.6118 calibration accuracy 0.799 entropy min/mean/max 0.0014 0.5911 1.9643 learning_rate 0.01 temp 1.6162 calibration accuracy 0.799 entropy min/mean/max 0.0014 0.5933 1.9652 learning_rate 0.01 temp 1.6118 calibration accuracy 0.799 entropy min/mean/max 0.0014 0.5911 1.9643 learning_rate 0.01 temp 1.6181 calibration accuracy 0.799 entropy min/mean/max 0.0015 0.5943 1.9655 learning_rate 0.01 temp 1.6126 calibration accuracy 0.799 entropy min/mean/max 0.0014 0.5915 1.9645 learning_rate 0.01 temp 1.6344 calibration accuracy 0.799 entropy min/mean/max 0.0016 0.6025 1.9687 learning_rate 0.01 temp 1.6338 calibration accuracy 0.799 entropy min/mean/max 0.0016 0.6022 1.9686 learning_rate 0.01 temp 1.6018 calibration accuracy 0.799 entropy min/mean/max 0.0013 0.5860 1.9623 learning_rate 0.001 temp 1.6054 calibration accuracy 0.799 entropy min/mean/max 0.0014 0.5878 1.9630 learning_rate 0.001 temp 1.6047 calibration accuracy 0.799 entropy min/mean/max 0.0013 0.5874 1.9629 learning_rate 0.001 temp 1.6102 calibration accuracy 0.799 entropy min/mean/max 0.0014 0.5903 1.9640 learning_rate 0.001 temp 1.6095 calibration accuracy 0.799 entropy min/mean/max 0.0014 0.5899 1.9638 learning_rate 0.001 temp 1.6112 calibration accuracy 0.799 entropy min/mean/max 0.0014 0.5908 1.9642 learning_rate 0.001 temp 1.6145 calibration accuracy 0.799 entropy min/mean/max 0.0014 0.5924 1.9648 learning_rate 0.001 temp 1.6134 calibration accuracy 0.799 entropy min/mean/max 0.0014 0.5919 1.9646 learning_rate 0.001 temp 1.6144 calibration accuracy 0.799 entropy min/mean/max 0.0014 0.5924 1.9648 learning_rate 0.001 temp 1.6105 calibration accuracy 0.799 entropy min/mean/max 0.0014 0.5904 1.9640 learning_rate 0.001 temp 1.6151 calibration accuracy 0.799 entropy min/mean/max 0.0014 0.5927 1.9650
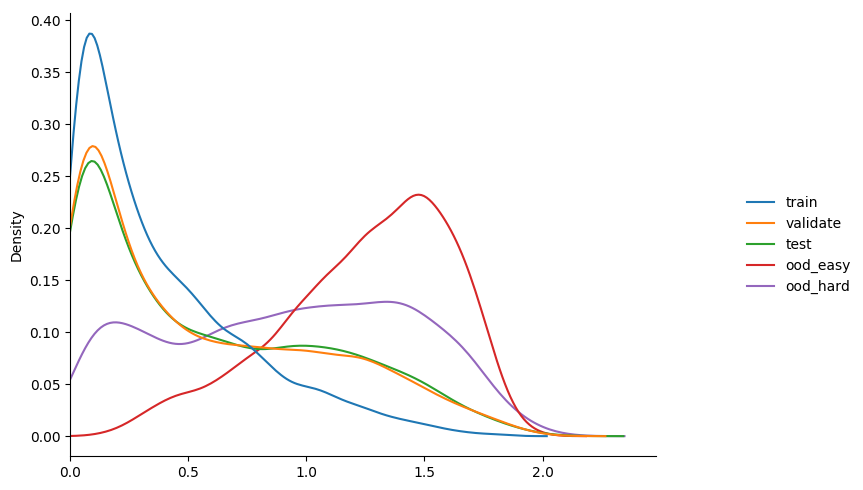
some observations...
- we're fitting a single value, so very fast!
- as expected we don't see any change in accuracy during training compared to
model_1. this is since the temp rescaling never changes the ordering of predictions. ( just this property alone could be enough reason to use this approach in some cases! ) - slightly better than
model_2in terms of raising the entropy ofood!
not bad for fitting a single parameter :D
model_4: use focal loss
as a final experiment we'll use focal loss for training instead of cross entropy
note: i rolled my own focal loss function which is always dangerous! it's not impossible (i.e. it's likely) i've done something wrong in terms of numerical stability; please let me know if you see a dumb bug :)
def focal_loss_sparse(logits, y_true, gamma=1.0):
log_probs = jax.nn.log_softmax(logits, axis=-1)
log_probs = log_probs[jnp.arange(len(log_probs)), y_true]
probs = jnp.exp(log_probs)
elementwise_loss = -1 * ((1 - probs)**gamma) * log_probs
return elementwise_loss
note that focal loss includes a gamma. we'll trial 1.0, 2.0 and 3.0 in line with the experiments mentioned in calibrating deep neural networks using focal loss
gamma 1.0
$ python3 train_basic_model.py --loss-fn focal_loss --gamma 1.0 --model-dir m4_1 learning_rate 0.001 validation accuracy 0.314 entropy min/mean/max 0.0193 1.0373 2.0371 learning_rate 0.001 validation accuracy 0.326 entropy min/mean/max 0.0000 0.5101 1.8546 learning_rate 0.001 validation accuracy 0.615 entropy min/mean/max 0.0000 0.6680 1.8593 learning_rate 0.001 validation accuracy 0.604 entropy min/mean/max 0.0000 0.5211 1.8107 learning_rate 0.001 validation accuracy 0.555 entropy min/mean/max 0.0001 0.5127 1.7489 learning_rate 0.0001 validation accuracy 0.758 entropy min/mean/max 0.0028 0.6008 1.8130 learning_rate 0.0001 validation accuracy 0.780 entropy min/mean/max 0.0065 0.6590 1.9305 learning_rate 0.0001 validation accuracy 0.796 entropy min/mean/max 0.0052 0.6390 1.8589 learning_rate 0.0001 validation accuracy 0.790 entropy min/mean/max 0.0029 0.5886 1.9151
gamma 2.0
$ python3 train_basic_model.py --loss-fn focal_loss --gamma 2.0 --model-dir m4_2 learning_rate 0.001 validation accuracy 0.136 entropy min/mean/max 0.0001 0.2410 1.7906 learning_rate 0.001 validation accuracy 0.530 entropy min/mean/max 0.0000 0.8216 2.0485 learning_rate 0.001 validation accuracy 0.495 entropy min/mean/max 0.0003 0.7524 1.9086 learning_rate 0.001 validation accuracy 0.507 entropy min/mean/max 0.0000 0.6308 1.8460 learning_rate 0.001 validation accuracy 0.540 entropy min/mean/max 0.0000 0.5899 2.0196 learning_rate 0.001 validation accuracy 0.684 entropy min/mean/max 0.0001 0.6189 1.9029 learning_rate 0.001 validation accuracy 0.716 entropy min/mean/max 0.0000 0.6509 1.8822 learning_rate 0.001 validation accuracy 0.606 entropy min/mean/max 0.0001 0.7096 1.8312 learning_rate 0.0001 validation accuracy 0.810 entropy min/mean/max 0.0002 0.6208 1.9447 learning_rate 0.0001 validation accuracy 0.807 entropy min/mean/max 0.0004 0.6034 1.8420
gamma 3.0
$ python3 train_basic_model.py --loss-fn focal_loss --gamma 3.0 --model-dir m4_3 learning_rate 0.001 validation accuracy 0.288 entropy min/mean/max 0.0185 1.1661 1.9976 learning_rate 0.001 validation accuracy 0.319 entropy min/mean/max 0.0170 1.0925 2.1027 learning_rate 0.001 validation accuracy 0.401 entropy min/mean/max 0.0396 0.9795 2.0361 learning_rate 0.001 validation accuracy 0.528 entropy min/mean/max 0.0001 0.8534 1.9115 learning_rate 0.001 validation accuracy 0.528 entropy min/mean/max 0.0002 0.7405 1.8509 learning_rate 0.0001 validation accuracy 0.748 entropy min/mean/max 0.0380 0.9204 1.9697 learning_rate 0.0001 validation accuracy 0.760 entropy min/mean/max 0.0764 0.9807 1.9861 learning_rate 0.0001 validation accuracy 0.772 entropy min/mean/max 0.0906 0.9646 2.0556 learning_rate 0.0001 validation accuracy 0.781 entropy min/mean/max 0.0768 0.8973 1.9264 learning_rate 0.0001 validation accuracy 0.780 entropy min/mean/max 0.0871 0.8212 1.9814
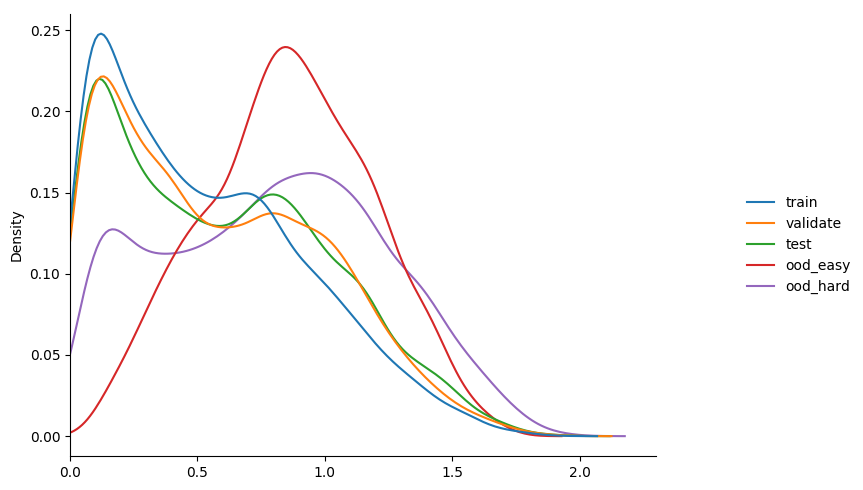
some observations...
- can see that immediately the model behaves more like
model_2thanmodel_1in terms of calibration. - increasing gamma really starts to seperate the
ooddata, but with a drop in overallvalidationaccuracy. maybe the seperation isn't as much as i'd like, but happy to experiment more given this result.
interesting!! focal loss is definitely going in my "calibration toolkit" :D
doing the actual detection though
recall the distribution plot of entropies from the model_3 experiment
we can eyeball that the entropies values are low for in-distribution sets (train, validate, calibrate and test) and high for the two ood sets (easy and hard) but how do we actually turn this difference into a in-distribution classifier? ( recall this is not a standard supervised learning problem, we only have the in-distribution instances to train against and nothing from the ood sets at training time )
amusingly i spent a bunch of time hacking around with all sorts of density estimation techniques but it turned out the simplest baseline i started with was the best :/
the baseline works on a strong, but valid enough, assumption of the entropies; the entropies for in-distribution instances will be lower than the entropies for OOD instances. given this assumption we can just do the simplest "classifier" of all; thresholding
to get a sense of the precision/recall tradeoff of approach we can do the following...
- fit a MinMax scaler to the
trainset; this scales all train values to (0, 1) - use this scaler to transform
test,ood_easyandood_hard; including (0, 1) clipping - "flip" all the values,
x = 1.0 - x, since we want a low entropy to denote a positive instance of in-distribution - compare the performance of this "classifier" by considering
testinstances as positives andoodinstances as negatives.
with this simple approach we get the following ROC, P/R and reliability plots.
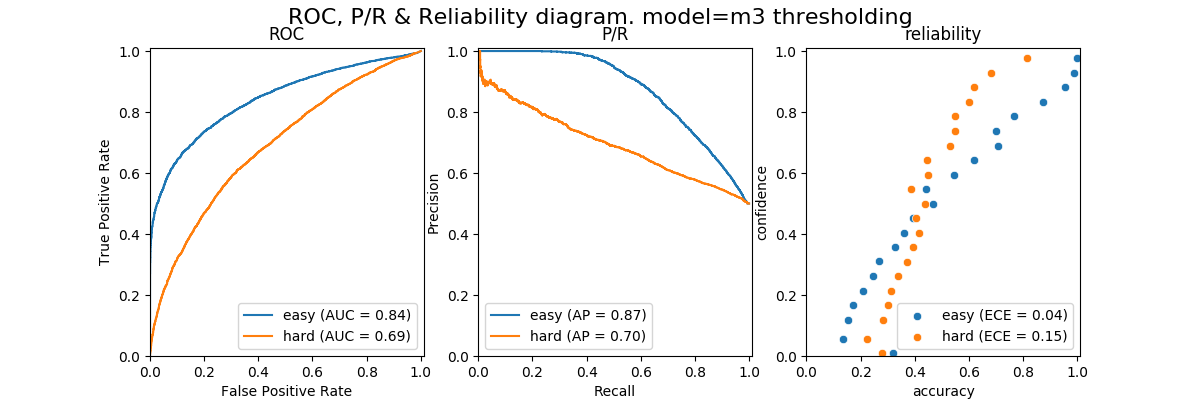
i've included the attempts i made to use a kernel density estimator in fit_kernel_density_to_entropy.py
so if you manage to get a result better than this trivial baseline please
let me know :)
other options for detecting OOD
though this post is about using entropy as a way of measuring OOD there are other ways too.
the simplest way i've handled OOD detection in the past is to include an explicit OTHER label. this has worked in cases where i've had data available to train against, e.g. data that was (somehow) sampled but wasn't of interest for actual supervised problem at hand. but i can see in lots of situations this wouldn't always be possible.
another approach i'm still hacking on is doing density estimation on the inputs; this related very closely to the diversity sampling ideas for active learning.
code
these experiments were written in objax, an object oriented wrapper for jax